Introducción
Este proyecto utiliza un Arduino para crear un sencillo detector de mala postura. Usaremos un sensor ultrasónico para medir la distancia entre el usuario y el dispositivo. Si la distancia disminuye por debajo de un umbral (indicando que la persona se ha encorvado), se activará una alerta sonora mediante un zumbador y una alerta visual con un LED. Es una excelente manera de aprender a usar sensores de distancia y controlar salidas basadas en condiciones.
Materiales Necesarios
Placa Arduino UNO (o compatible)
Sensor Ultrasónico HC-SR04
Zumbador (Buzzer) piezoeléctrico
1 LED (cualquier color)
1 Resistencia de 220 ohmios (para proteger el LED)
Protoboard
Cables Jumper (macho-macho y macho-hembra)
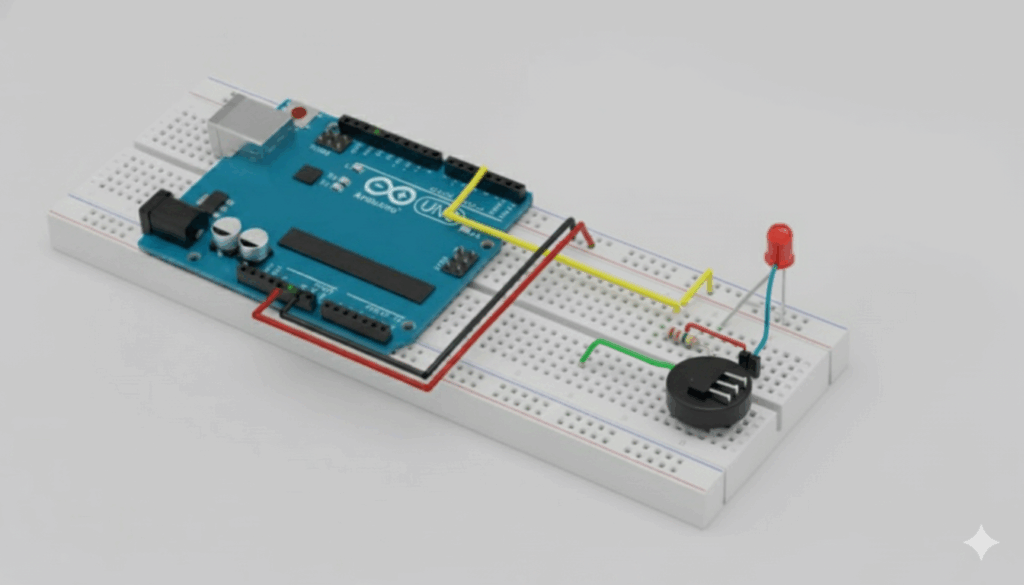
Esquema de Montaje
El montaje se centra en conectar el sensor ultrasónico y los componentes de alerta (LED y zumbador) al Arduino.
Conexiones:
- Sensor HC-SR04:
VCC→ Pin5Vdel Arduino.Trig→ Pin digital10del Arduino.Echo→ Pin digital11del Arduino.GND→ PinGNDdel Arduino.
Zumbador:
Pata positiva (+) → Pin digital
9del Arduino.Pata negativa (-) → Pin
GNDdel Arduino.
LED:
Pata larga (ánodo, +) → Un extremo de la resistencia de 220Ω. El otro extremo de la resistencia → Pin digital
8del Arduino.Pata corta (cátodo, -) → Pin
GNDdel Arduino.
Código de Arduino
// Definimos los pines para el sensor ultrasónico y las alertas const int trigPin = 10; const int echoPin = 11; const int buzzerPin = 9; const int ledPin = 8; // Variables para la distancia y duración del pulso long duration; int distance; // Umbral de distancia (en cm) para detectar mala postura // Ajusta este valor según tu configuración y la distancia deseada int postureThreshold = 30; // Por ejemplo, alerta si está a menos de 30 cm void setup() { pinMode(trigPin, OUTPUT); // Trig Pin será una salida pinMode(echoPin, INPUT); // Echo Pin será una entrada pinMode(buzzerPin, OUTPUT); // Buzzer Pin será una salida pinMode(ledPin, OUTPUT); // LED Pin será una salida Serial.begin(9600); // Iniciamos comunicación serial para depuración (opcional) } void loop() { // Generamos un pulso corto en el pin Trig para iniciar la medición digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Leemos la duración del pulso de retorno en el pin Echo duration = pulseIn(echoPin, HIGH); // Calculamos la distancia en centímetros // Velocidad del sonido = 343 m/s = 0.0343 cm/µs // Distancia = (Tiempo * Velocidad) / 2 (porque el sonido va y vuelve) distance = duration * 0.0343 / 2; // Mostramos la distancia en el Monitor Serie (opcional) Serial.print("Distancia: "); Serial.print
Código de Python
Necesitas tener Python instalado en tu ordenador.
Necesitas instalar la biblioteca
pyserial. Puedes hacerlo abriendo una terminal o símbolo del sistema y ejecutando:pip install pyserial
import serial import time # --- Configuración --- # Reemplaza 'COM3' con el puerto serie correcto de tu Arduino. # En Linux/Mac puede ser algo como '/dev/ttyACM0' o '/dev/tty.usbmodemXXXX' # Puedes encontrar el puerto en el IDE de Arduino (Herramientas -> Puerto). SERIAL_PORT = 'COM3' BAUD_RATE = 9600 # El mismo umbral que usaste en el código de Arduino (en cm) POSTURE_THRESHOLD = 30 # --- Fin Configuración --- print(f"Intentando conectar al puerto {SERIAL_PORT} a {BAUD_RATE} baudios...") try: # Inicializa la conexión serie arduino = serial.Serial(SERIAL_PORT, BAUD_RATE, timeout=1) # Espera un momento para que se establezca la conexión time.sleep(2) print("Conexión establecida. Esperando datos...") while True: try: # Lee una línea de datos desde el Arduino line = arduino.readline().decode('utf-8').strip() # Comprueba si la línea contiene la palabra "Distancia" if "Distancia:" in line: print(f"Recibido: {line}") # Muestra la línea completa recibida try: # Divide la cadena por ':' y luego por ' ' para aislar el número parts = line.split(':') if len(parts) > 1: # Corrección de sintaxis en el original (falta un punto) distance_str = parts[1].strip().split(' ')[0] distance = int(distance_str) # Comprueba si la distancia es menor que el umbral if 0 < distance < POSTURE_THRESHOLD: print("---------------------------------") print("¡ALERTA! Mala postura detectada.") print("---------------------------------") except ValueError: # Si no se puede convertir a número, ignora la línea pass except Exception as e: print(f"Error procesando la línea: {e}") # Pequeña pausa para no sobrecargar la CPU time.sleep(0.05) except serial.SerialException as e: print(f"Error de lectura del puerto serie: {e}") break except KeyboardInterrupt: print("\nDeteniendo el script.") break except Exception as e: print(f"Ocurrió un error inesperado: {e}") # Intenta seguir leyendo si es posible time.sleep(1) except serial.SerialException as e: print(f"No se pudo conectar al puerto {SERIAL_PORT}. Error: {e}") print("Verifica que el puerto sea correcto y que no esté siendo usado por otro programa (como el Monitor Serie del IDE de Arduino).") finally: # Asegúrate de cerrar el puerto al salir if 'arduino' in locals() and arduino.is_open: arduino.close() print("Puerto serie cerrado.")
Explicación del Código
Medición Ultrasónica:
El sensor HC-SR04 funciona enviando un pulso de sonido (
Trig) y midiendo el tiempo que tarda en regresar el eco (Echo).Enviamos un pulso corto (
HIGHpor 10 microsegundos) entrigPin.Usamos
pulseIn(echoPin, HIGH)para medir cuánto tiempo el pinEchopermanece enHIGH. Este es el tiempo que tardó el sonido en ir y volver.La distancia se calcula usando la fórmula:
distancia = (duración * velocidad_del_sonido) / 2. Usamos0.0343cm/µs como velocidad del sonido. Dividimos por 2 porque la duración medida es del viaje de ida y vuelta.
Detección de Postura:
Establecemos una variable
postureThresholdque define la distancia mínima (en cm) a la que debe estar el usuario.En el
loop(), después de calcular ladistance, usamos una sentenciaifpara comprobar sidistancees menor quepostureThreshold(y mayor que 0 para evitar errores de lectura).
Activación de Alertas:
Si la condición del
ifes verdadera (mala postura), activamos el zumbador contone(buzzerPin, 1000), que genera un sonido de 1000 Hz.También encendemos el LED con
digitalWrite(ledPin, HIGH).
Desactivación de Alertas:
Si la condición del
ifes falsa (buena postura o sensor no detecta nada cercano), usamosnoTone(buzzerPin)para silenciar el zumbador ydigitalWrite(ledPin, LOW)para apagar el LED.
delay(100): Añadimos una pequeña pausa al final dellooppara estabilizar las lecturas y evitar que el zumbador suene de forma demasiado continua si se está cerca del umbral.