Introducción
Este proyecto te permite crear una estación de monitoreo y alarma física para la temperatura de tu ordenador. Utilizaremos un script de Python para leer (o simular) la temperatura de la CPU en tiempo real. Este script envía comandos simples (como ‘B’, ‘M’, o ‘A’) a una placa Arduino a través del puerto serie (USB). El Arduino, a su vez, interpreta estos comandos para activar un sistema de alerta visual (LEDs de colores) y sonoro (un buzzer).
Es una forma innovadora y clara de tener un control externo sobre la «salud» de tu PC, ideal para gamers o al realizar tareas pesadas que pueden causar sobrecalentamiento. Es un proyecto perfecto para aprender sobre la comunicación serial entre un programa de PC (Python) y el hardware (Arduino).
Materiales Necesarios
Placa Arduino (Cualquier modelo estándar, como el Arduino UNO, Nano, o similar).
Un ordenador (PC o portátil) con Python instalado y la capacidad de instalar librerías (como
pyserial).3 LEDs de colores (Específicamente: 1 Verde, 1 Amarillo, 1 Rojo).
1 Buzzer (Zumbador), preferiblemente un modelo «activo» que suena al recibir voltaje.
3 Resistencias de 220Ω (una para cada LED).
Protoboard (Placa de pruebas).
Cables Jumper (tipo macho-macho).
Cable USB (adecuado para tu placa Arduino, para conectarla al PC).
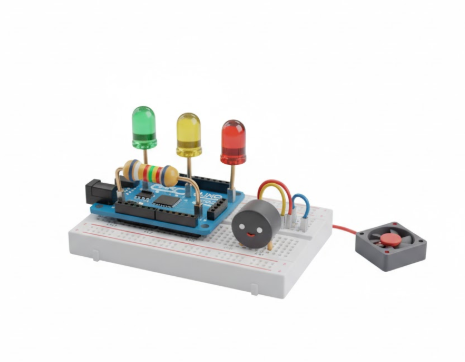
Esquema de Montaje
El montaje se centra en conectar los componentes de salida (LEDs y buzzer) a los pines digitales del Arduino.
Cada uno de los 3 LEDs se conecta a un pin digital diferente (ej. pines 10, 11 y 12).
Cada LED debe tener su resistencia de 220Ω conectada en serie (generalmente en la pata larga, ánodo) para limitar la corriente.
El buzzer se conecta a otro pin digital (ej. pin 9).
Todos los componentes (los 3 LEDs y el buzzer) deben compartir una conexión a tierra, conectando sus pines negativos (cátodos o patas cortas) al pin GND del Arduino.
Conexiones:
El circuito es muy directo. Todos los componentes se alimentan y controlan directamente desde el Arduino.
LED Verde (Nivel Seguro):
Ánodo (pata larga) → Resistencia de 220Ω → Pin 10 del Arduino.
Cátodo (pata corta) → Pin GND del Arduino.
LED Amarillo (Nivel Advertencia):
Ánodo (pata larga) → Resistencia de 220Ω → Pin 11 del Arduino.
Cátodo (pata corta) → Pin GND del Arduino.
LED Rojo (Nivel Peligro):
Ánodo (pata larga) → Resistencia de 220Ω → Pin 12 del Arduino.
Cátodo (pata corta) → Pin GND del Arduino.
Buzzer (Alarma de Peligro):
Pin Positivo (+) (o pata larga) → Pin 9 del Arduino.
Pin Negativo (-) (o pata corta) → Pin GND del Arduino.
Conexión Principal:
Cable USB → Conecta el Arduino al puerto USB de tu ordenador (este cable sirve tanto para la alimentación como para la comunicación de datos desde Python).
Código de Arduino
// Pines para los LEDs const int pinLedVerde = 10; const int pinLedAmarillo = 11; const int pinLedRojo = 12; // Pin para el buzzer (reemplaza al motor) const int pinBuzzer = 9; void setup() { // Inicia la comunicación serie (clave) Serial.begin(9600); pinMode(pinLedVerde, OUTPUT); pinMode(pinLedAmarillo, OUTPUT); pinMode(pinLedRojo, OUTPUT); pinMode(pinBuzzer, OUTPUT); // Configura el pin del buzzer // Asegurarse que todo empieza apagado apagarTodo(); } void loop() { // Revisa si Python ha enviado algún dato if (Serial.available() > 0) { // Lee el carácter de comando char comando = Serial.read(); if (comando == 'B') { // 'B' de Baja apagarTodo(); digitalWrite(pinLedVerde, HIGH); } else if (comando == 'M') { // 'M' de Media apagarTodo(); digitalWrite(pinLedAmarillo, HIGH); } else if (comando == 'A') { // 'A' de ALARMA apagarTodo(); digitalWrite(pinLedRojo, HIGH); digitalWrite(pinBuzzer, HIGH); // ¡Activa la alarma! } else if (comando == 'O') { // 'O' de Off apagarTodo(); } } } // Función para apagar todo void apagarTodo() { digitalWrite(pinLedVerde, LOW); digitalWrite(pinLedAmarillo, LOW); digitalWrite(pinLedRojo, LOW); digitalWrite(pinBuzzer, LOW); // Apaga el buzzer }
Código de Python
Necesitas tener Python instalado en tu ordenador.
Necesitas instalar la biblioteca
pyserial. Puedes hacerlo abriendo una terminal o símbolo del sistema y ejecutando:pip install pyserial
import serial import time # --- CONFIGURACIÓN DE UMBRALES (Igual que antes) --- UMBRAL_MEDIO = 60.0 # Grados C para pasar a Amarillo UMBRAL_ALTO = 80.0 # Grados C para activar la Alarma (Rojo + Buzzer) # --- TEMPERATURAS FALSAS PARA LA DEMO --- # Esta lista simula una subida de temperatura, una alarma, y una bajada. # Puedes cambiar los números como quieras. lista_de_temperaturas = [ 45.0, # Normal (Verde) 55.0, # Normal (Verde) 65.0, # Advertencia (Amarillo) 75.0, # Advertencia (Amarillo) 81.0, # ¡ALARMA! (Rojo + Buzzer) 85.0, # ¡ALARMA! (Rojo + Buzzer) 72.0, # Baja a Advertencia (Amarillo) 50.0 # Vuelve a Normal (Verde) ] try: # IMPORTANTE: Conéctate al COM5 arduino = serial.Serial(port='COM5', baudrate=9600, timeout=1) print("Conectado a Arduino en COM5. ¡INICIANDO SIMULACIÓN!") print("Esto demostrará la comunicación Python -> Arduino.") time.sleep(2) indice = 0 # Bucle infinito para que la demo se repita while True: # 1. Obtiene la temperatura falsa de nuestra lista temp = lista_de_temperaturas[indice] # 2. Lógica de decisión (exactamente igual que antes) if temp >= UMBRAL_ALTO: print(f"[SIMULADO] ¡ALARMA! Temperatura: {temp}°C") arduino.write(b'A') # 'A' de Alarma (Rojo + Buzzer) elif temp >= UMBRAL_MEDIO: print(f"[SIMULADO] Advertencia. Temperatura: {temp}°C") arduino.write(b'M') # 'M' de Media (Amarillo) else: print(f"[SIMULADO] Normal. Temperatura: {temp}°C") arduino.write(b'B') # 'B' de Baja (Verde) # 3. Avanza al siguiente número de la lista indice = indice + 1 # 4. Si llega al final de la lista, vuelve al principio if indice >= len(lista_de_temperaturas): indice = 0 print("--- Reiniciando simulación ---") # Espera 3 segundos antes de mostrar la siguiente temperatura time.sleep(3) except serial.SerialException: print(f"Error: No se pudo conectar a COM5.") print("Asegúrate de que el Arduino esté conectado y el IDE cerrado.") except KeyboardInterrupt: print("\nDeteniendo simulación.") finally: # Al salir, apaga todo en el Arduino if 'arduino' in locals() and arduino.is_open: arduino.write(b'O') # 'O' de Off arduino.close() print("Conexión cerrada.")
Explicación del código
1. El Script de Python (El Emisor)
Biblioteca
serial(PySerial): Esta es la biblioteca clave. Permite a Python acceder a los puertos COM (puertos serie) del ordenador.arduino = serial.Serial(port='COM5', baudrate=9600, ...): Esta línea es la que abre la conexión con tu placa Arduino, especificando el puerto (el que tú usas) y la velocidad de comunicación (9600 baudios), que debe ser idéntica a la configurada en el Arduino.
Biblioteca
time: Se usa simplemente paratime.sleep(3), que crea una pausa de 3 segundos entre cada envío de datos.Lógica del Script (Simulación): En lugar de leer un sensor real, el script tiene una lista predefinida:
lista_de_temperaturas = [45.0, 55.0, 65.0, ...].Un bucle
while True:recorre esta lista continuamente.Una estructura
if...elif...elsecompara la temperatura (falsa) actual de la lista con las variablesUMBRAL_MEDIOyUMBRAL_ALTO.Acción Clave: Dependiendo de la temperatura, Python envía un único byte al Arduino. Por ejemplo,
arduino.write(b'A'). Labantes de la letra indica que se envía como un byte (datos crudos) y no como un texto normal.
Bloque
try...except...finally:El
try:envuelve el código principal para que, si falla (por ejemplo, si el Arduino está desconectado o el COM5 está ocupado por el IDE de Arduino), el programa no se bloquee.El
except serial.SerialException:captura ese error y te avisa.El
finally:se asegura de que, si el script se cierra (incluso con Ctrl+C), se ejecutearduino.close(), liberando el puerto COM5.
2. El Código de Arduino (El Receptor)
Comunicación Serial (Integrada): No se necesitan bibliotecas especiales; Arduino lo trae incorporado.
Serial.begin(9600): Inicia la comunicación serie en el Arduino, asegurándose de que «escuche» a la misma velocidad (9600 baudios) a la que Python «habla».
Configuración (
setup()):Se usan
pinMode(PIN, OUTPUT)para todos los pines de los LEDs (10, 11, 12) y el pin del buzzer (9), indicando que el Arduino enviará voltaje hacia ellos.
Lógica del
loop(): El Arduino se dedica a escuchar pasivamente.if (Serial.available() > 0): Esta es la función más importante. Constantemente pregunta: «¿Ha llegado algún dato (byte) desde el PC?».char comando = Serial.read();: Si la respuesta es sí, esta línea lee ese byte que llegó (la ‘A’, ‘M’, ‘B’ u ‘O’) y lo guarda en la variablecomando.Estructura
if...else if...: El código comprueba el valor de la variablecomando.if (comando == 'A'): Si el comando es ‘A’ (Alarma), apaga todo y luego enciende el LED rojo y el buzzer usandodigitalWrite(pinLedRojo, HIGH);ydigitalWrite(pinBuzzer, HIGH);.apagarTodo(): Es una función auxiliar que creamos para asegurarnos de que todos los LEDs y el buzzer estén apagados (LOW) antes de encender el correcto. Esto evita que los LEDs se queden encendidos de estados anteriores.
Este proyecto es una excelente demostración de cómo combinar un script de PC (Python) con la electrónica (Arduino) para crear un sistema de monitoreo interactivo y en tiempo real.
Material
Aquí os dejamos los materiales que nosotros compramos cuando empezamos. Si quieres darnos una pequeña ayuda puedes comprar desde este link. Gracias por leernos!
- Placa arduino: https://amzn.to/43LM4k4
- Protoboard: https://amzn.to/3LZaZdM
- Cables: https://amzn.to/3K5N3ox
- Leds: https://amzn.to/4iryuse
- Buzzer: https://amzn.to/4ilPlfX
- Básicos: https://amzn.to/3Kkl1FT
- Pack de lo necesario para empezar: https://amzn.to/3MmuDAs